Multikopter yapımında sıklıkla kullanılan ekranlı veya ekransız modelleriyle karşımıza çıkan kullanılması basit bir kontrol kartıdır. Kendi içinde yazılımı hazır şekilde gelir. İçinde sadece 4 motorlu drone yazılımı yoktur. Farklı farklı versiyonları da içinde yüklüdür. Üzerinde bulunan tuşlar sayesinde çok rahat kontrol edilebilir ve değerleri istenilen şekilde değiştirilebilir.
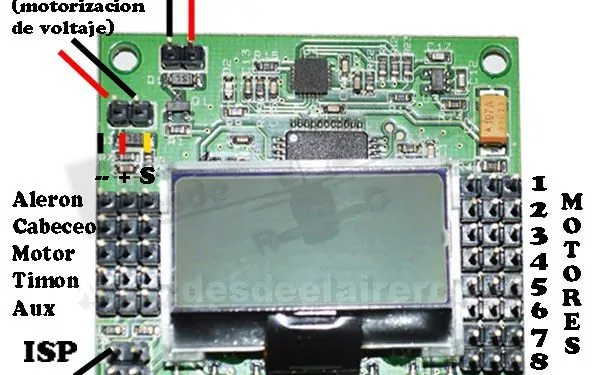
8 motora kadar entegre edilebilir. Sağ tarafa motorlar düzgünce takılmalıdır. (+5V ) , (-) ve Sinyal yerleri escden gelen kablolarla düzgünce takılır. Sol taraf ise kumandaya gönderilecek olan sinyal yerleridir.
Onun üstünde bulunan “bateria” yazılan yere batarya-mızın güç durumunu kontrolü için bataryadan kablo bağlanır ve bu sayede bataryanın yüzde kaç olduğunu kumandamızda görebiliriz. Onun üst tarafında bulunan “buzzer” yazan yere ses çıkarabilen parça takılır yani buzzer . Bu sayede kontrol kartımızın durumunu çıkan seslerden anlayabiliriz.
Kartımızı bağladıktan sonra açtığımızdan ilk önce bu ekran karşınıza gelir. Eğer herhangi bir sorun olursa error vermeye başlar.

Menü!ye bastığımızda karşımızıda bu ekran gelecektir.Bu menüde Kontrol kartımızın bütün kontrollerine ulaşabiliriz.

QUADCOPTERİMİZİN TİPİNİ “LOAD MOTOR LAYOUT” BÖLÜMÜNDEN SEÇİYORUZ.

Bu kısımın içerisinde size farklı farklı seçenekler sunuacak.


SELF-LEVEL desteği nedir ?
Bu özelliğimiz KK2’ye yeni 2.1 güncellemesiyle geldi. Bu özellik Quadcopterimizin havada dengeyi sağlayabilmesini sağlar. Örnek veriyorum Drone’muzda sağa doğru gitmesi için tuşa basıp bıraktığımızda drone sağa doğru eğik kalacak tekrar toplaması yani düz olabilmesi için sola doğru basmamız gerekecek . Self level desteği bunu yapmamıza gerek bıraktırmadan drone’u kendi kendine toplayabilir.
Receiver Test nedir?
Bu alanda kanallarımızın sağa veya sola çekip çekmediğini görebiliriz ve drone’muzu kalibre edebiliriz.
Mode Settings nedir ?
Burada self level özelliğini istersek kumanda da bir kanala atayabiliyoruz.
Stick Scaling nedir?
Bu bölüm dronemuzun ne kadar sert veya zayıf tepki vereceğini ayarlıyoruz. Sağa-sola-öne-arkaya bastığımızda ne kadar tepki verip vermeyeceğini ayarlayabiliyoruz.
PI Editör nedir ?
Uçuş sırasındaki en önemli paremetrelerdendir. Ne kadar stabil olabileceğini belirliyor. Yani quadcopter bu değerler sayesinde dengeye gelip gelemeyeceğini anlıyoruz.
Misc Settings nedir ?
Gaz kolunu yukarıya kaldırdığımızda en düşük vereceği gazı belirleriz. Ayrıca pilimizin bitmeye yakın ayarladığımız voltajla pil bitiyor alarmı ayarlanabilir.
En son kısımda ACC CALİBRATİON bölümünden quadcopterimizi düz bir zeminde kalibre ediyoruz ve uçuşa hazır hale getiriyoruz .